2. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ТЕЛЕСКОПИЧЕСКОГО ПОДЪЕМНИКА
"ТЕМП"
2.1. Грузоподъемность, кг 100
2.2. Максимальная высота от пола до рабочей площадки, м 6,7
2.3. Минимальная высота от пола до рабочей площадки, м 3,9
2.4. Усилие на рукоятке лебедки, кН (кгс) 0,1 (10)
2.5. Скорость подъема и опускания рабочей площадки, м/мин
5 |
3. УСТРОЙСТВО И ПРИНЦИП РАБОТЫ
ТЕЛЕСКОПИЧЕСКОГО ПОДЪЕМНИКА "ТЕМП"
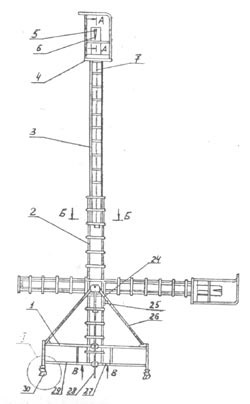
Подъемник телескопический монтажный ТЕМП (рис.) состоит
из следующих основных узлов: тележки 1, секции неподвижной
2, секции подвижной 3, площадки рабочей 4, лебедки 6
и троса 7
На рисунке подъемник показан в рабочем положении и тонкими
линиями в транспортном положении. Тележка 1 служит опорой
подъемника и состоит из двух соединенных поперечинами
24,27, ферм 29, опирающихся на четыре ходовых колеса
30, аутригеров28 и стоек26. Вертикальная ось 35 ходового
колеса 30проходит внутри стоики 37, которая соединена
с втулкой 38 и заканчивается внизу муфтой 39. Такое
крепление колеса в стойке фермы позволяет выставить
тележку по отвесу 25 на неровностях пола. Неровности
могут достигать 100мм.
Настройка производится муфтой 39. Кроме того, при перемещении
подъемника колесо свободно поворачивается вокруг вертикальной
оси. Горизонтальная ось 41 ходового колеса крепится
в стопоре 42, шарнирно закрепленном на башмаке 40 вертикальной
оси. В рабочем положении стопоры опускаются в нижнее
положение. При этом колеса прижимаются к башмакам и
надежно тормозятся. Для транспортирования необходимо
поднять стопоры 42 до упора в башмаки и освободить тем
самым колеса. |
 |
Стойки 26 крепится к ферме 29 и имеют в верхней части гнезда
для крепления цапф секции неподвижной 2. К средним звеньям
стоек хомутами крепятся аутригеры 28, служащие для придания
подъемнику большей устойчивости в поперечном направлении.
Перемещением хомутов можно выставлять аутригеры на небольшом
расстоянии от фермы тележки 29.
Поперечины 27 служат упором при установке секции неподвижной
2 в вертикальное положение. Фиксация секции производится
эксцентриком 34, рукоятка 32 которого при повороте соскакивает
с крючка 31. При этом пружина 33 заводит эксцентрик за упор
секции неподвижной 2, а эксцентрик при дальнейшем повороте
рукоятки 32 прижимает секцию неподвижную к поперечинам 27.
Поперечина 24 служит опорой для секции неподвижной 2 при
переводе подъемника в транспортное положение.
Секция подвижная 3, к верхней части которой крепится рабочая
площадка 4 с лебедкой 6, перемещается внутри секции неподвижной
2 на роликах 23 за счет лебедки 6. Трос от лебедки проходит
проходи в промежутках между секциями неподвижной 2 и подвижной
3 и крепится к секции неподвижной. Секция подвижная 3 блоками
14 опирается на трос 7. Блоки 14 смонтированы на рычаге
15, который к секции подвижной крепится шарнирно.
На рычаге 15 закреплен упор 20, на который опирается кривошип
19 ловителя.
Ловитель представляет собой два соединенных шестернями
16 замка 21, имеющих на концах эксцентрики 17, расположенные
с двух сторон полки уголка 18. Уголок 18 приварен внутри
неподвижной секции 2. В случае обрыва троса под действие
пружины кручения 22 валика 21 проворачиваются эксцентрики
17, зажимают полку уголка 18, и ловитель останавливает падение.
Путь торможения не превышает 500мм.
Рукоятка 5 лебедки крепится к вал-шестерне 8 через втулку
13 на резьбе. При вращении рукоятки 5 по часовой стрелке
она наворачивается на втулку 13, зажимая фрикционные кольца
12 и храповик 11, и за счет сил трения поворачивает барабан
9. Собачка 10 не дает храповику вращаться в обратную сторону,
а силы трения надежно удерживают площадку на любой высоте
при подъеме и опускании. Для опускания площадки необходимо,
не освобождая собачку 10, вращать рукоятку 5 против часовой
стрелки. При этом уменьшается усилие зажатия фрикционных
дисков 12 и храповика 11. Под действием груза барабан 9
начинает раскручиваться, освобождая трос, а вал-шестерня
8 со втулкой 13 при этом будут вворачиваться в рукоятку
5, зажимая фрикционные кольца 12 и храповик 11. С прекращением
вращения рукоятки 5 прекратится опускание площадки.
|




